
Hoe de hoogtenauwkeurigheid in TwoNav GPS te verbeteren?
Inhoud
Преамбула
Vanaf begin 2021 biedt IGN gratis toegang tot enkele van zijn gegevens:
- De "TOP 25"-kaarten van IGN zijn nog niet gratis, maar de "Map"-versie die beschikbaar is op Géoportail is gratis.
- De IGN 5 x 5m hoogtemeter databases zijn vrij beschikbaar. Met deze databases kunt u een digitaal terreinmodel maken, d.w.z. hoogtekaart met een horizontale resolutie van 5 m x 5 m of 1 m x 1 m met een verticale resolutie van 1 m. Of een geweldige definitie voor de gebruikers die we zijn.
Dit artikel, in de vorm van een tutorial, is meer specifiek bedoeld voor gebruikers van GPS TwoNav- en Land-software.
Vanaf vandaag is het niet mogelijk om de Garmin GPS-hoogtegegevens te beïnvloeden.
Wat is een digitaal terreinmodel (DTM)
Een digitaal hoogtemodel (DEM) is een driedimensionale weergave van het aardoppervlak, gemaakt op basis van hoogtegegevens. De nauwkeurigheid van het hoogtebestand (DEM) is afhankelijk van:
- Kwaliteit van hoogtegegevens (nauwkeurigheid en gebruikte faciliteiten voor onderzoeken),
- Eenheidscelgrootte (pixel),
- Over de horizontale lokalisatienauwkeurigheid van deze rasters,
- De nauwkeurigheid van je geolocatie en dus de kwaliteit van je gps, je connected watch of je smartphone.
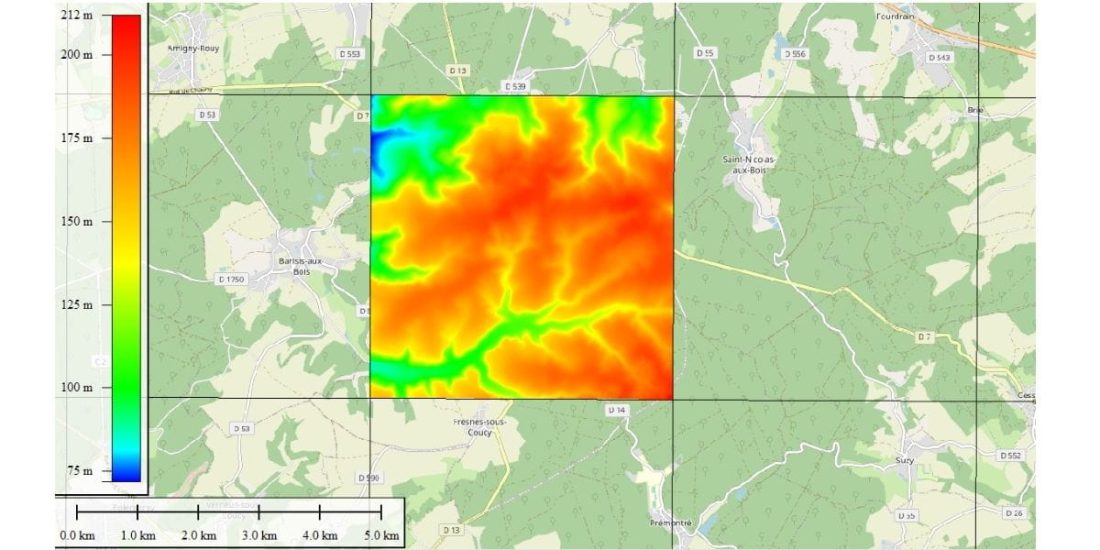 Plaat of tegel uit de IGN Altimetric-database. Tegel van 5 km x 5 km bestaande uit 1000 × 1000 cellen of 5 m x 5 m cellen (Fort Saint Gobain Aisne). Dit scherm wordt geprojecteerd op de basiskaart van OSM.
Plaat of tegel uit de IGN Altimetric-database. Tegel van 5 km x 5 km bestaande uit 1000 × 1000 cellen of 5 m x 5 m cellen (Fort Saint Gobain Aisne). Dit scherm wordt geprojecteerd op de basiskaart van OSM.
DEM is een bestand dat de hoogtewaarde definieert van een punt in het midden van het raster, met het volledige oppervlak van het raster op dezelfde hoogte.
Een Aisne BD Alti IGN-afdelingsbestand van 5 x 5 m (een afdeling die is gekozen vanwege de grote omvang) bevat bijvoorbeeld iets minder dan 400 tegels.
Elk raster wordt geïdentificeerd door een reeks lengte- en breedtegraadcoördinaten.
Hoe kleiner de rastermaat, hoe nauwkeuriger de hoogtegegevens. Hoogtedetails die kleiner zijn dan de rastergrootte (resolutie) worden genegeerd.
Hoe kleiner de rastergrootte, hoe hoger de nauwkeurigheid, maar hoe groter het bestand zal zijn, dus het zal meer geheugenruimte in beslag nemen en moeilijker te verwerken zijn, waardoor andere verwerkingsbewerkingen mogelijk worden vertraagd.
De DEM-bestandsgrootte voor een afdeling is ongeveer 1Mo voor 25m x 25m, 120Mo voor 5m x 5m.
De DEM's die door de meeste apps, websites, GPS en consumentensmartphones worden gebruikt, zijn afkomstig van gratis wereldwijde gegevens die door NASA worden verstrekt.
De volgorde van nauwkeurigheid van een NASA DEM is een celgrootte van 60 m x 90 m en een staphoogte van 30 m. Dit zijn onbewerkte bestanden, ze zijn niet gecorrigeerd en vaak worden de gegevens geïnterpoleerd, de nauwkeurigheid is gemiddeld, er kunnen grote fouten.
Dit is een van de redenen voor de verticale onnauwkeurigheid van GPS, wat het waargenomen hoogteverschil voor een track verklaart, afhankelijk van de website waarop het wordt gehost, de GPS of de smartphone die het hoogteverschil registreerde.
- De Sonny MNT (zie verderop in deze gids) is gratis beschikbaar voor Europa met een celgrootte van ongeveer 25 m x 30 m. Het gebruikt nauwkeurigere gegevensbronnen dan de NASA MNT en er zijn belangrijke bugfixes uitgevoerd. Dit is een relatief nauwkeurige DEM die geschikt is voor mountainbiken, met goede prestaties op Europese landenschaal.
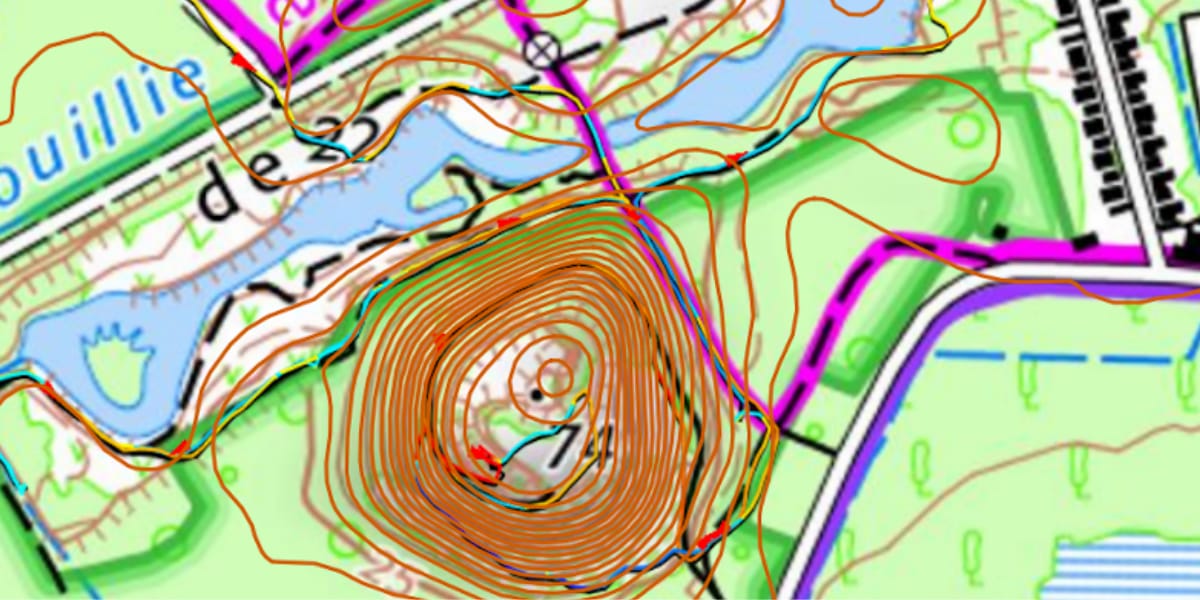 In de bovenstaande afbeelding is een hoogtemetertegel (MNT BD Alti IGN 5 x 5) die terrils bedekt (nabij Valenciennes) omgezet in hoogtelijnen met een onderlinge afstand van 2,5 m en bovenop de IGN-kaart. Met de afbeelding kunt u de kwaliteit van deze DEM "overtuigen".
In de bovenstaande afbeelding is een hoogtemetertegel (MNT BD Alti IGN 5 x 5) die terrils bedekt (nabij Valenciennes) omgezet in hoogtelijnen met een onderlinge afstand van 2,5 m en bovenop de IGN-kaart. Met de afbeelding kunt u de kwaliteit van deze DEM "overtuigen".
- De IGN DEM van 5 x 5 m heeft een horizontale resolutie (celgrootte) van 5 x 5 m en een verticale resolutie van 1 m. Deze DEM geeft de hoogte van het terrein weer; de hoogte van infrastructuurobjecten (gebouwen, bruggen, hagen, etc.) wordt niet in aanmerking genomen. In het bos is dit de hoogte van de aarde aan de voet van de bomen, het wateroppervlak is het oppervlak van de kust voor alle stuwmeren groter dan een hectare.
Montage en installatie van de DEM
Om sneller te gaan: een TwoNav GPS-gebruiker heeft een digitaal terreinmodel voor Frankrijk samengesteld op basis van IGN-gegevens van 5 x 5 m. Deze kunnen per regio worden gedownload van de gratis toegangssite: CDEM op 5 m (RGEALTI).
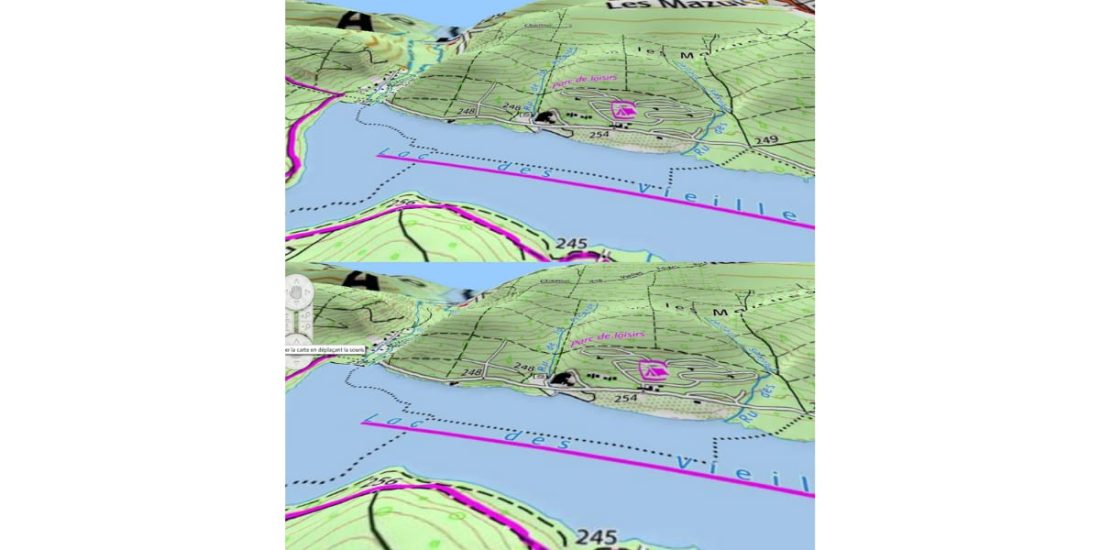
Voor de gebruiker is de juiste test om de betrouwbaarheid van de "DEM" te beoordelen de visualisatie van het meeroppervlak in 3D.
Onder het meer van oude smederijen (Ardennen), weergegeven in 3D BD Alti IGN hierboven en BD Alti Sonny hieronder. We zien dat de kwaliteit er is.
De CDEM-hoogtemeterkaarten die TwoNav standaard levert voor hun GPS- of LAND-software zijn niet erg betrouwbaar.
Deze "tutorial" biedt dus een gebruikershandleiding voor het downloaden van "tegels" met betrouwbare hoogtemetinggegevens voor de TwoNav GPS- en LAND-software.
De gegevens zijn gratis beschikbaar voor:
- Heel Europa: Sonny hoogtemeting database,
- Frankrijk: IGN Hoogtemeter Database.
U kunt een bestand maken dat een land, een afdeling of alleen een geografisch gebied bestrijkt (plaat/tegel/pellet) om bruikbaar geheugen te besparen of om kleinere bestanden te gebruiken.
Sonny Hoogtemeter Database
De 1 inch modellen zijn onderverdeeld in 1°x1° bestandsfragmenten en zijn beschikbaar in SRTM (.hgt) formaat met een celgrootte van 22x31m afhankelijk van de breedtegraad, een formaat dat wereldwijd wordt gebruikt en door veel programma's wordt gebruikt. Ze zijn gemarkeerd met hun coördinaten, zoals N43E004 (43°N, 4°O).
procedure
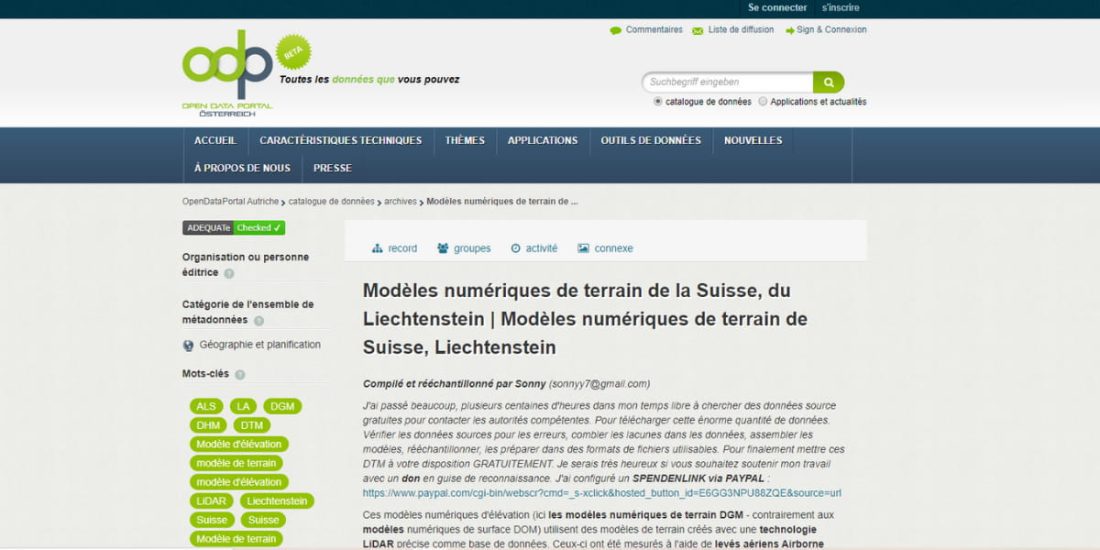
- Maak verbinding met de site https://data.opendataportal.at/dataset/dtm-france
- Download de tegels die overeenkomen met het geselecteerde land of geografische sector.
Pak de .HGT-bestanden uit de gedownloade .ZIP-bestanden.
Upload in LAND elk .HGT-bestand
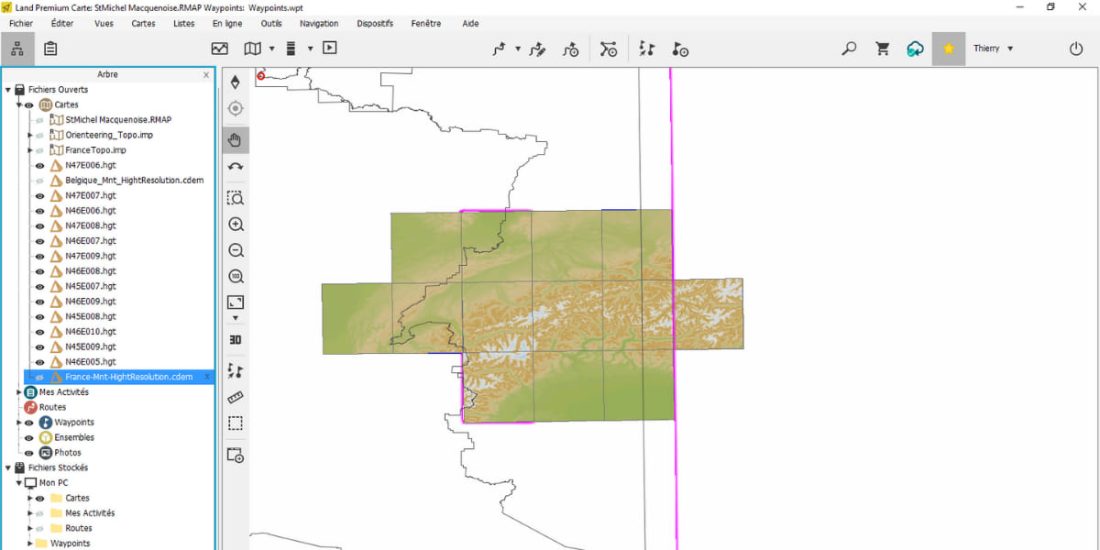
- In LAND staan alle gewenste .hgts open, sluit de rest.
- Voer "Combineer deze DEMS" uit, de compilatietijd kan lang zijn, afhankelijk van het aantal te verzamelen tegels (kies cdem-extensie) voor een .CDEM-bestand dat kan worden gebruikt op Twonav GPS.
OSM "tegel" en MNT "tegel" display in LAND, allemaal overdraagbaar naar GPS en 100% gratis!
IGN Hoogtemeting Database
Deze database bestaat uit een catalogus per afdeling.
procedure
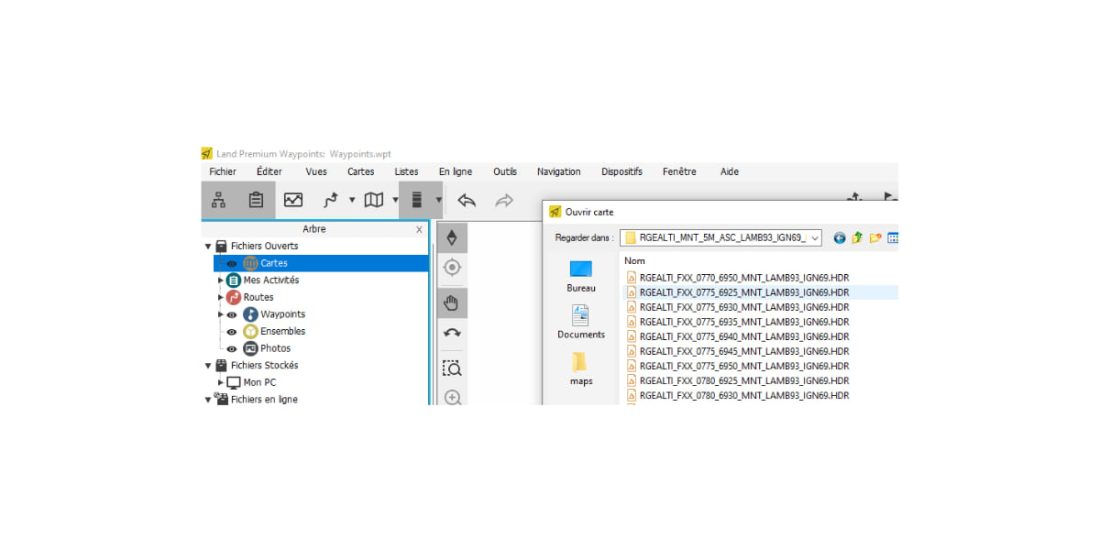
- Maak verbinding met de Geoservices-site. Als deze link niet werkt: uw browser "heeft geen toegang tot FTP": geen paniek! Gebruikershandleiding:
- In uw bestandsbeheerder:
- klik met de rechtermuisknop op "deze pc"
- klik met de rechtermuisknop op "netwerklocatie toevoegen"
- Voer het adres "ftp: // RGE_ALTI_ext: Thae5eerohsei8ve@ftp3.ign.fr" in zonder " ";
- Geef deze toegang een naam om deze te identificeren ex IGN geoservice
- Beëindig het proces
- Wacht een paar minuten totdat de bestandenlijst is bijgewerkt (dit duurt een paar minuten)
- U heeft nu toegang tot IGN-gegevens:
- Klik met de rechtermuisknop op het gegevensbestand dat u wilt kopiëren.
- PASTE vervolgens in de doelmap
- De oplaadtijd kan lang zijn!
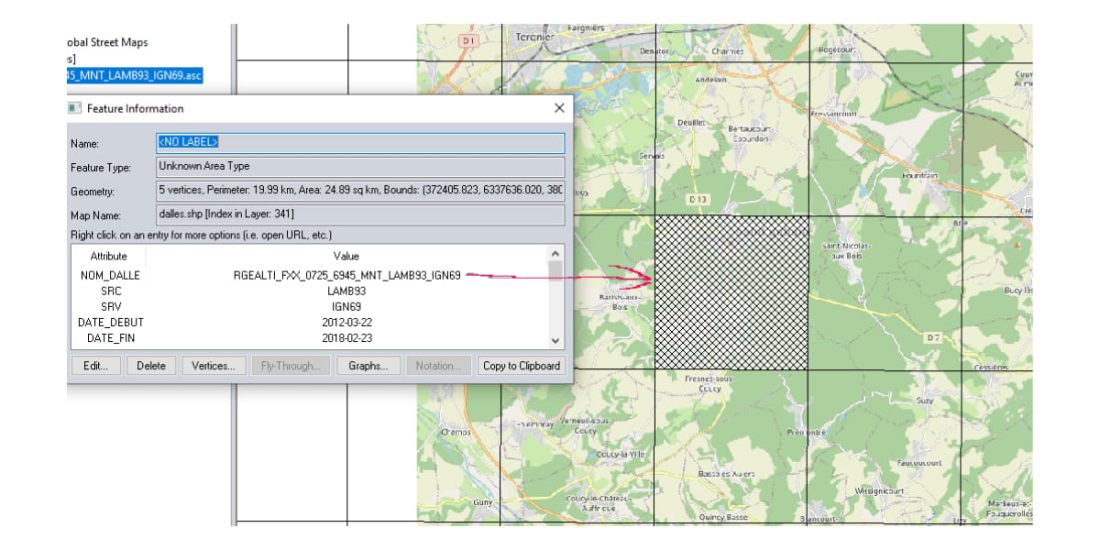
Deze afbeelding illustreert het importeren van de Vaucluse hoogtemeterdatabase van 5 m x 5 m. Klik met de rechtermuisknop op het bestand, kopieer het naar een map en wacht op downloaden.
Na het uitpakken van het “gezipte” bestand wordt een boomstructuur verkregen. De gegevens komen overeen met ongeveer 400 databestanden (tegels) 5 km x 5 km of 1000 × 1000 cellen 5 m x 5 m in .asc-formaat (tekstformaat) voor de afdeling.
Een schijf van meerdere tegels bedekt meestal de MTB-route.
Elke cel van 5x5 km wordt geïdentificeerd door een reeks Lambert 93-coördinaten.
De UTM-coördinaten van de linkerbovenhoek van deze tegel of tegels zijn: x = 52 6940 en y = 5494 775:
- 775: kolomrang (770, 775, 780, ...) op de kaart
- 6940: Kaartlijnrang
- Dans LAND
- Zoek in de volgende stap de gegevens in de map "data", selecteer alleen het eerste bestand:
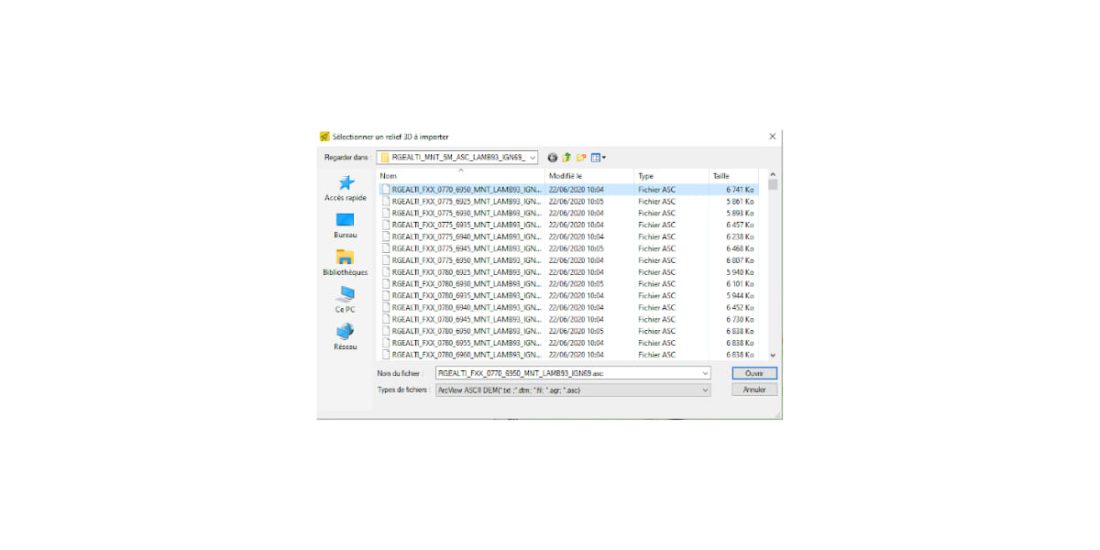
- Openen, dan bevestigen, onderstaand venster zal openen, wees voorzichtig, dit is de meest delicate stap :
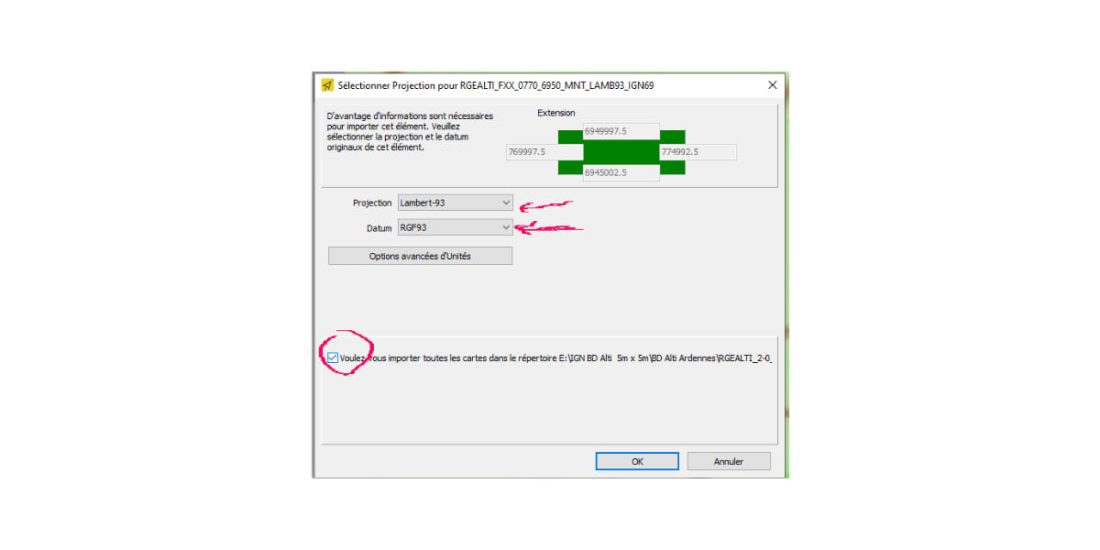
Selecteer de projectie Lambert-93 en Datum RGF 93 en vink het vakje in de linker benedenhoek aan.
Land haalt en formatteert gegevens uit *.asc-tegels, wat enige tijd kan duren.
Na het maken van platen van DEM in SRTM (HGT / DEM) formaat, zijn er evenveel als *.asc-bestanden.
- Met Land kunt u ze "combineren" tot een enkel DEM-bestand of per tegel of korrel om aan uw behoeften te voldoen (houd er rekening mee dat de bestandsgrootte de GPS-verwerking kan vertragen)
Voor gebruiksgemak verdient het de voorkeur (niet verplicht) om eerst alle openstaande kaarten te sluiten.
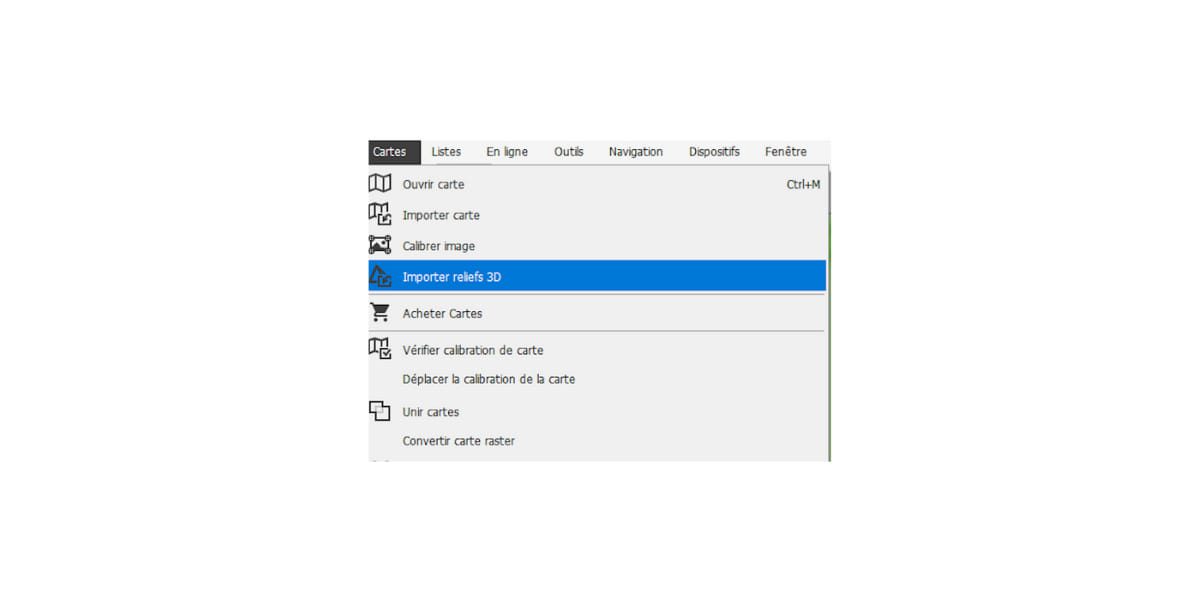
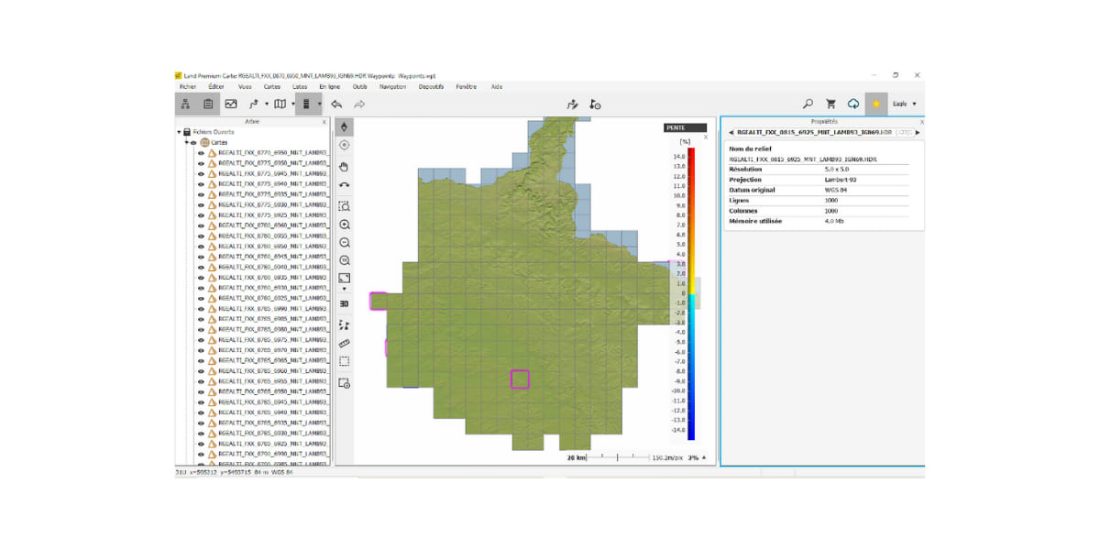
Open in het kaartmenu (zie hieronder) alle bestanden in *.hdr-indeling (minst volumineus) van de geïmporteerde DB-gegevensdirectory (hetzelfde als bij de vorige bewerkingen)
Land opent HDR-bestanden, afdeling DEM is geladen en kan gebruikt worden
- Hier kunt u de Ardennes DEM (DEM) gebruiken, om het gebruik te vergemakkelijken zullen we ze samenvoegen tot één bestand.
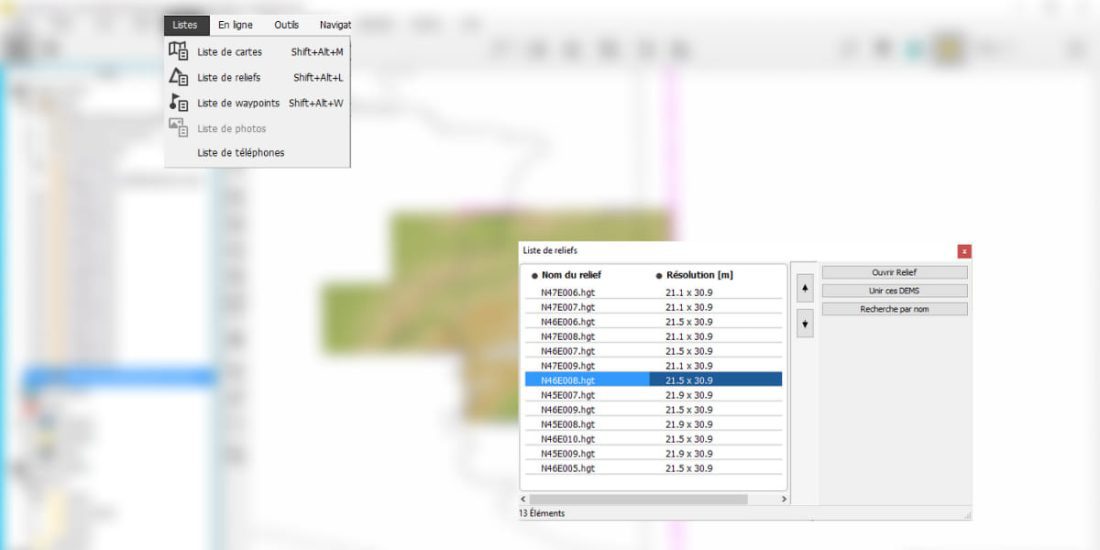
Lijstmenu:
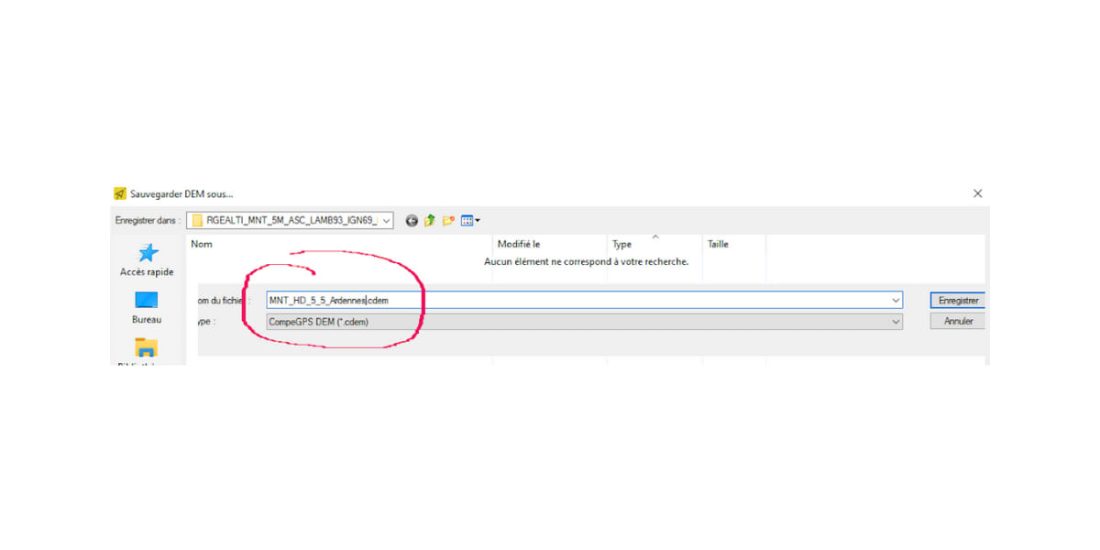
Combineer deze DEM's
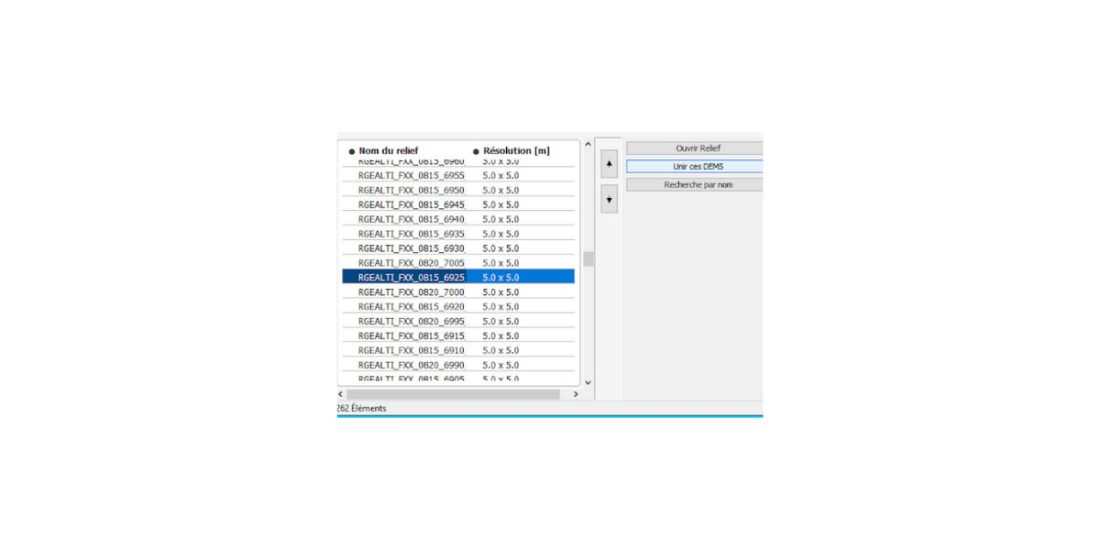
Selecteer *.cdem formaat en noem het bestand DEM.
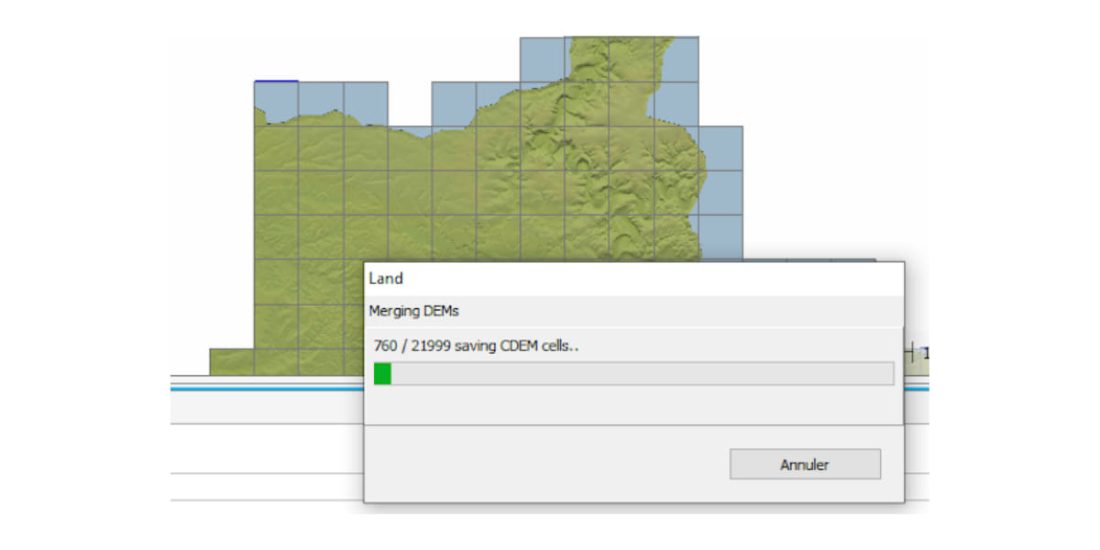
Het samenvoegen duurt even, er moeten meer dan 21 bestanden worden samengevoegd. Vandaar de aanbeveling om te werken met MNT-pellets die uw speelterreinen bedekken.
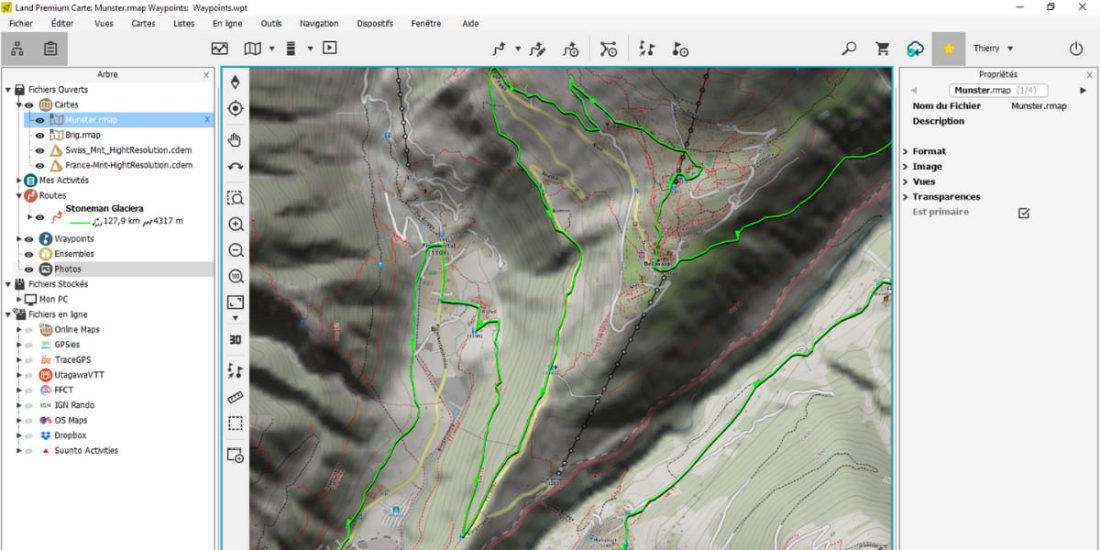
Het digitale landschapsmodel van de Ardennen dat we hebben gemaakt, open dit bestand gewoon met de IGN Geoportal-kaart zoals hieronder weergegeven.
De test wordt uitgevoerd door direct de UtagawaVTT-baan "Château de Linchamp" te openen die bij de start wordt weergegeven op een hoogteverschil van 997 m, 981 m met Sonny DTM (vorig proces) en 1034 m wanneer Land de hoogte op elk punt vervangt door een DTM-hoogte van 5mx5m .
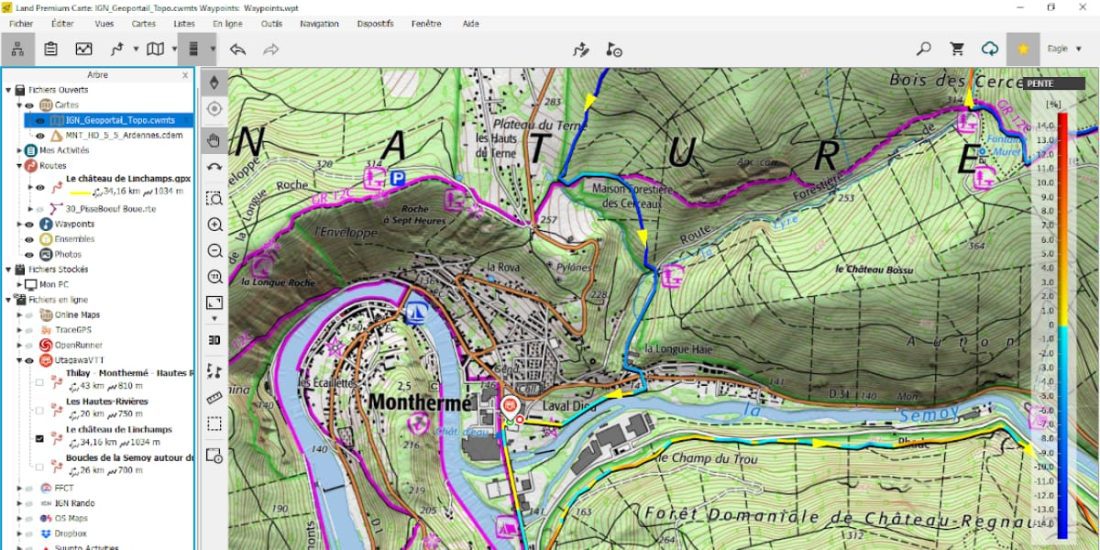 Het niveauverschil berekenen door de hoogtelijnen op de IGN-kaart bij elkaar op te tellen, toont een niveauverschil van 1070 m, dat is een verschil van 3%, wat vrij correct is.
Het niveauverschil berekenen door de hoogtelijnen op de IGN-kaart bij elkaar op te tellen, toont een niveauverschil van 1070 m, dat is een verschil van 3%, wat vrij correct is.
De waarde van 1070 blijft een benadering omdat het niet triviaal is om krommen op een kaart in reliëf te berekenen.
Een hoogtemeterbestand gebruiken
MNT.cdem-bestanden kunnen door LAND worden gebruikt voor hoogte-extractie, hoogteberekening, helling, waypoint-tracks, enz .; en voor alle TwoNav GPS-apparaten plaatst u het bestand in de map /map en selecteert u het als map.cdem.
Een blogbericht over onnauwkeurige hoogten behandelt het probleem van hoogtemeting en hoogteverschillen met GPS, een principe dat zowel op GPS-horloges als op smartphone-apps kan worden toegepast.
Fabrikanten gebruiken verschillende methoden om de onnauwkeurigheden in dit artikel te "wissen", filtering (voortschrijdend gemiddelde) van de hoogtegegevens, met behulp van een barometrische sensor of een digitaal terreinmodel.
GPS-hoogte is "luidruchtig", d.w.z. fluctueert rond een gemiddelde waarde, barometrische hoogte hangt af van de grillen van barometrische druk en temperatuur, dus weer- en DEM-bestanden kunnen onnauwkeurig zijn.
De hybridisatie van een barometer met GPS of DEM is gebaseerd op het volgende principe:
- Over een lange periode hangt de verandering in barometrische hoogte af van de weersomstandigheden (druk en temperatuur),
- Gedurende een lange periode worden GPS-hoogtefouten uitgefilterd,
- DEM-fouten zijn lange tijd als ruis, dus ze worden eruit gefilterd.

Hybridisatie bestaat uit het berekenen van de gemiddelde GPS- of DEM-hoogte en het daaruit halen van de hoogteverandering.
Gedurende de laatste 30 minuten neemt de hoogte van het gefilterde geluid (GPS of MNT) bijvoorbeeld toe met 100m; in dezelfde periode nam de door de barometer aangegeven hoogte echter toe met 150 meter.
Logischerwijs zou de hoogteverandering hetzelfde moeten zijn. Als u de eigenschappen van deze sensoren kent, kunt u de barometer -50 m "herconfigureren".
Normaal gesproken wordt in Baro + GPS- of 3D-modi de barometerhoogte gecorrigeerd zoals een wandelaar of klimmer handmatig zou doen door een IGN-kaart te controleren.
Concreet detecteert een recente GPS of een recente smartphone (goede kwaliteit) u (FIX) met een nauwkeurigheid van 3,5 m in het horizontale vlak 90 van de 100 keer wanneer de ontvangstomstandigheden ideaal zijn.
Deze horizontale "prestatie" komt overeen met een celgrootte van 5m x 5m of 25m x 25m, en het gebruik van deze DTM's geeft een goede nauwkeurigheid in het verticale vlak.
DEM toont de hoogte van de grond, als u bijvoorbeeld de Tarn-vallei oversteekt op het viaduct van Millau, zou de track geregistreerd op de DEM u naar de bodem van de vallei moeten brengen, zelfs als het pad op het platform van het viaduct blijft. .
Een ander voorbeeld is wanneer u aan het mountainbiken bent of op een steile berghelling reist, de horizontale nauwkeurigheid van de GPS wordt verslechterd door de effecten van maskers of multipath; dan komt de aan FIX toegewezen hoogte overeen met de hoogte van de aangrenzende of verder weg gelegen plaat, dus naar de bovenkant of de onderkant van de vallei.
In het geval van een rij gevormd door roosters met een groot oppervlak, zal de hoogte tussen de bodem van de vallei en de bovenkant gemiddeld zijn!
Voor deze twee extreme maar typische voorbeelden zal het cumulatieve hoogteverschil geleidelijk afwijken van de werkelijke waarde.
Aanbevelingen voor gebruik
Om bijwerkingen te voorkomen:
- Kalibreer kort voor vertrek de GPS-barometer op de hoogte van uw startpunt (aanbevolen door alle GPS-fabrikanten),
- laat uw GPS een paar FIXES maken voordat u begint met volgen, zodat de locatienauwkeurigheid overeenkomt,
- selecteer hybridisatie: hoogteberekening = Barometer + GPS of Barometer + 3D.
Als uw baanhoogte is gesynchroniseerd met DEM, heeft u zeer nauwkeurige hoogte- en hellingsberekeningen, zoals in de afbeelding hieronder waar het verschil slechts 1 meter is.
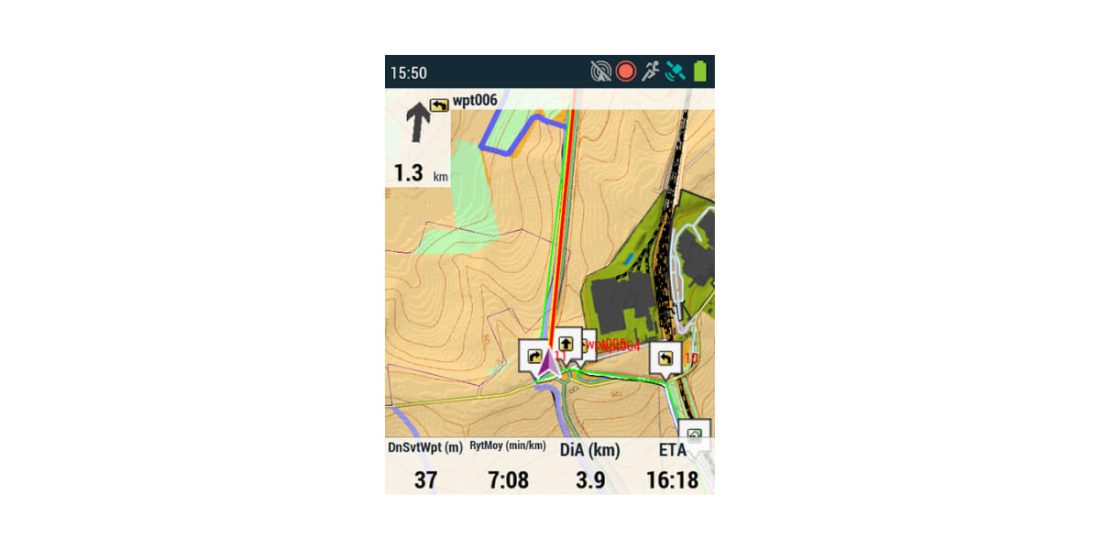
- GPS Trail 2 (72 dpi gedegradeerde beeldopname, 200 dpi GPS-scherm)
- Overlay raster- en vectorkaart van OSM
- Schaal 1: 10
- CDEM 5mx5m BD Alti IGN arcering benadrukt de hoogte in stappen van 1m.
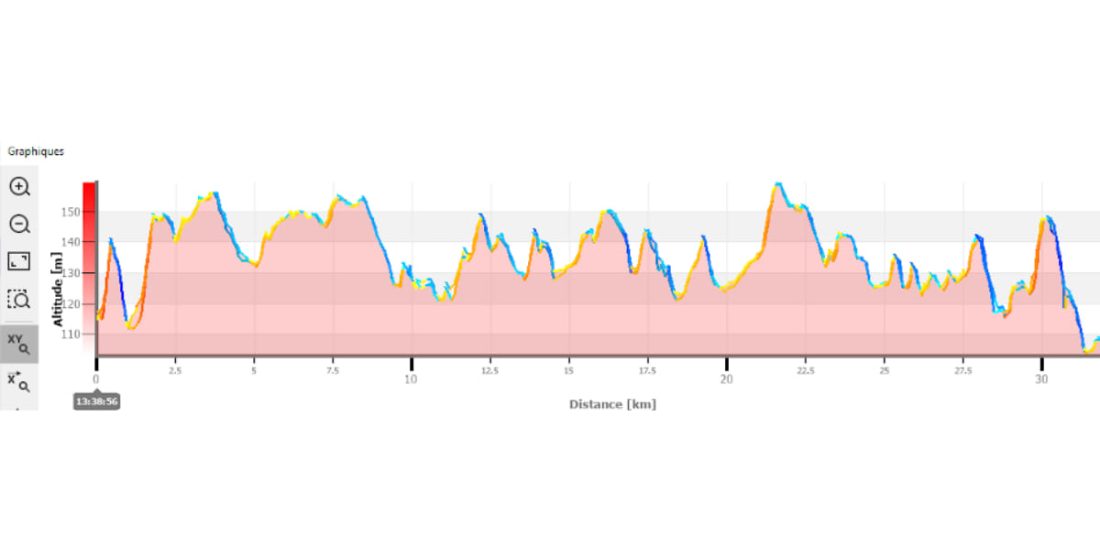
De onderstaande afbeelding vergelijkt het profiel van twee identieke tracks van 30 km (van dezelfde bekendheid), waarvan de hoogte is gesynchroniseerd met IGN DEM en de andere met Sonny DEM, een route die wordt uitgevoerd in baro + hybride modus 3d.
- Hoogte op de IGN-kaart: 275 m.
- Hoogte berekend met behulp van GPS in Hybrid Baro + 3D-modus: 295 m (+ 7%)
- Hoogte berekend met behulp van GPS in Hybrid Baro + GPS-modus: 297 m (+ 8%).
- Gesynchroniseerde klim op IGN MNT: 271 m (-1,4%)
- Gesynchroniseerde klim op Sonny MNT: 255 m (-7%)
"Waarheid" ligt waarschijnlijk buiten 275m IGN vanwege de instelling van de curve.
Een voorbeeld van automatische kalibratie (compensatie) van een GPS-barometrische hoogtemeter tijdens de hierboven getoonde route (Origineel logbestand van GPS):
- Geen verticale accumulatie voor hoogteverschilberekening: 5 m, (Parameterisering identiek aan IGN-kaartcurven),
- Hoogte tijdens kalibratie/reset:
- gps 113.7 meter,
- Barometrische hoogtemeter 115.0 m,
- Hoogte MNT 110.2 m (Carte IGN 110 m),
- Iteratie (berekeningsperiode): 30 minuten
- Barometrische correctie voor de komende 30 minuten: – 0.001297
